
MR-conditional actuations: A review
Published in Annals of Biomedical Engineering, 2020
Authors
Qingyu Xiao, Reza Monfaredi, Mishek Musa, Kevin Cleary, & Yue Chen
Abstract
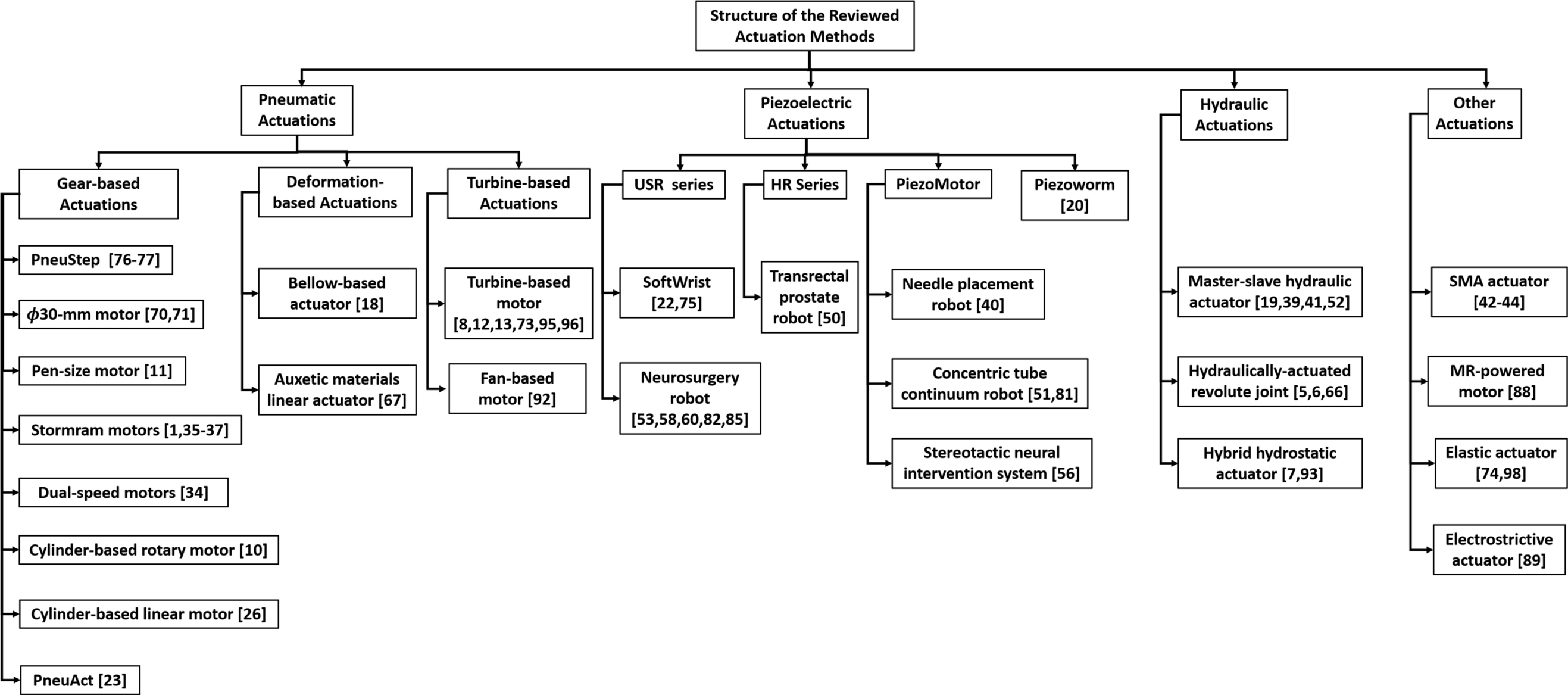
Magnetic resonance imaging (MRI) is one of the most prevailing technologies to enable noninvasive and radiation-free soft tissue imaging. Operating a robotic device under MRI guidance is an active research area that has the potential to provide efficient and precise surgical therapies. MR-conditional actuators that can safely drive these robotic devices without causing safety hazards or adversely affecting the image quality are crucial for the development of MR-guided robotic devices. This paper aims to summarize recent advances in actuation methods for MR-guided robots and each MR-conditional actuator was reviewed based on its working principles, construction materials, the noteworthy features, and corresponding robotic application systems, if any. Primary characteristics, such as torque, force, accuracy, and signal-to-noise ratio (SNR) variation due to the variance of the actuator, are also covered. This paper concludes with a perspective on the current development and future of MR-conditional actuators.
Recommended citation: Xiao, Q., Monfaredi, R., Musa, M. et al. MR-Conditional Actuations: A Review. Ann Biomed Eng 48, 2707–2733 (2020). https://doi.org/10.1007/s10439-020-02597-8
Download Paper