
Autonomous respiratory motion compensated robot for CT-guided abdominal radiofrequency ablations
Published in IEEE Transactions on Medical Robotics and Bionics, 2023
Authors
Anthony Gunderman, Mishek Musa, Benjamin Gunderman, Filip Banovac, Kevin Cleary, Xiaofeng Yang, & Yue Chen
Abstract
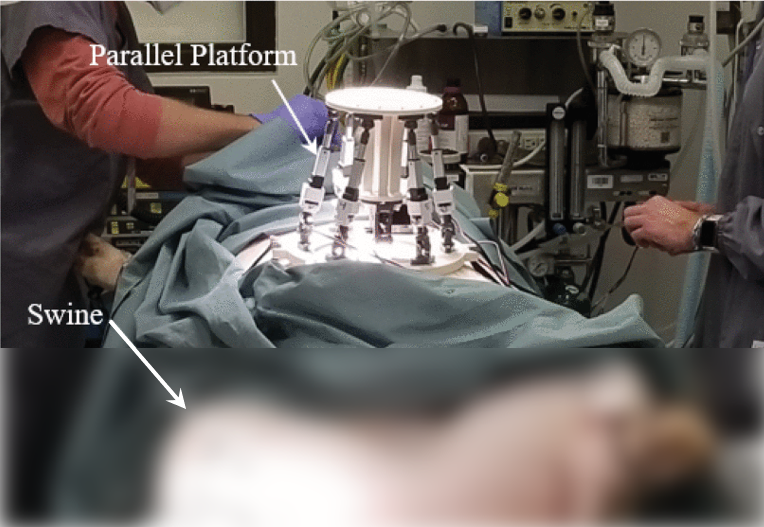
Radiofrequency ablation (RFA) is an effective minimally-invasive treatment used for a variety of solid tumor cancers, including lung, breast, kidney, pancreatic, and liver. However, effective RFA for abdominal tumors relies on accurate ablation needle targeting, which can be a challenging task due to respiratory motion. This paper presents the design, fabrication, modeling, and benchtop characterization of a CT-guided parallel robot, and a novel respiration motion compensation protocol (RMCP) for effective robot-assisted abdominal RFA needle placement. The robot consists of a Stewart platform with a friction drive roller insertion module for autonomous needle deployment. Strain energy models are used to predict needle insertion force, the primary technical contribution of this work, providing a mean error of 0.49 ± 0.28 N. The free-space accuracy characterization experiments indicate that the robotic platform is able to provide a needle tip position and orientation accuracy of 2.00 ± 0.75 mm and 0.81 ± 0.48°, respectively. A dynamic targeting experiment using an ex-vivo liver indicates an improvement in position and orientation error of 57% and 30%, respectively, when using the proposed RMCP. Finally, an animal study using a sexually-mature swine undergoing assisted respiration at nine breaths per minute indicates a 77% reduction in additional insertion displacement when using the RMCP.
Recommended citation: Gunderman, A. L., Musa, M., Gunderman, B. O., Banovac, F., Cleary, K., Yang, X., & Chen, Y. (2023). Autonomous respiratory motion compensated robot for CT-guided abdominal radiofrequency ablations. IEEE Transactions on Medical Robotics and Bionics, 5(2), 206-217.
Download Paper